Sensores ultrasonicos
Descripción
Al igual que los murciélagos, el sensor ultrasónico HC-SR04 utiliza un sonar para determinar la distancia a un objeto. Este sensor ofrece una excelente detección y alcance con alta precisión y lecturas estables en un paquete simple y fácil de usar. Viene completo con un módulo transmisor y un receptor ultrasónico.
El HC-SR04 o sensor ultrasónico se utiliza en una amplia gama de proyectos electrónicos, para la creación de robots de detección de obstáculos, medición de distancias, así como en otras aplicaciones. En este módulo, se presentará un método simple para medir distancias con un Arduino y un sensor ultrasónico.
Especificación

· Fuente de alimentación: + 5V DC.
· Corriente de reposo: <2mA.
· Corriente de trabajo: 15mA.
· Ángulo efectivo: <15°.
· Distancia de alcance: 2cm – 400 cm.
· Resolución: 0,3 cm.
· Ángulo de medición: 30 grados.
· • Ancho de pulso de entrada del disparador: 10uS.
Equipo
El Principio De Funcionamiento Del Sensor Ultrasónico
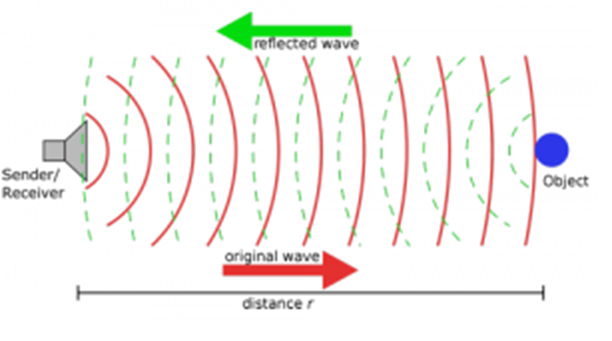
Como se presentó anteriormente, el sensor ultrasónico tiene dos “ojos”. Uno es el extremo transmisor y el otro es el extremo receptor.
El módulo ultrasónico emitirá ondas ultrasónicas después de la señal de activación. Cuando las ondas ultrasónicas encuentran un obstáculo delante de ellas, se reflejan hacia atrás. Luego, el módulo genera una señal de eco, por lo que puede determinar la distancia al objeto a partir de la diferencia de tiempo entre la señal de disparo y la señal de eco.
t es el tiempo total desde que se emite la señal hasta que encuentra un obstáculo y regresa al receptor. La velocidad de propagación del sonido en el aire es de aproximadamente 343 m/s, por lo tanto, distancia = velocidad * tiempo. A medida que la onda ultrasónica emitida va y viene, tenemos 2 veces la distancia. Por lo tanto, el resultado debe dividirse por 2, siendo la distancia medida por la onda ultrasónica = (velocidad * tiempo)/2.
Así, el funcionamiento del sensor ultrasónico es el siguiente:
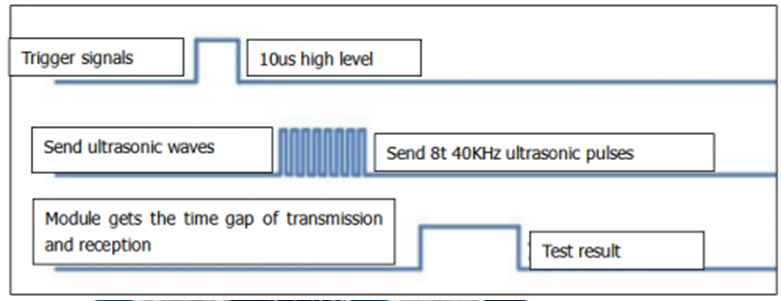
1. El módulo ultrasónico establece el tiempo de retardo del pin trigonométrico del SR04 en 10 μs, que se puede activar al comienzo de la detección de la distancia de obstáculos.
2. Después de la activación, el módulo enviará automáticamente ocho pulsos ultrasónicos de 40 KHz y detectará si hay retorno de señal. Este paso será completado automáticamente por el módulo.
3. Si la señal regresa, el pin Echo emitirá un nivel alto y la duración del nivel alto será el tiempo desde la transmisión de la onda ultrasónica hasta su regreso.
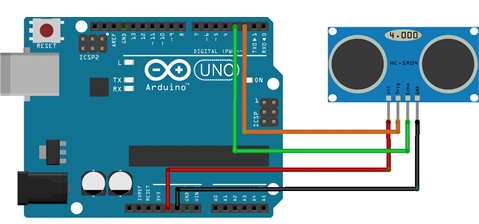
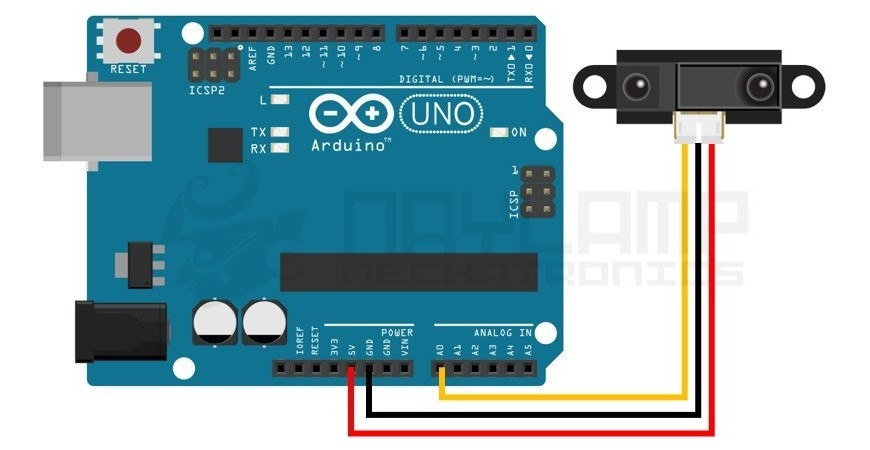
Las conexiones a hacer son:
Sensor ultrasónico Arduino
Vcc +5V
Trig 10
Echo 9
Gnd Gnd
El código es:
int i =1;
int trigPin =10;
int echoPin = 9;
float duracion, cm;
void setup() {
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
Serial.begin (9600);
delay (10);
}
// El sensor se activa mediante un pulso ALTO de 10 o más milisegundos que da un pulso PEQUEÑO antes de comenzar para garantizar un pulso ALTO limpio
void loop(){
digitalWrite (trigPin, LOW);
delayMicroseconds(20);
digitalWrite (trigPin, HIGH);
delayMicroseconds(20);
digitalWrite(trigPin,LOW);
duracion = pulseIn (echoPin,HIGH);
cm = (duracion/2) / 29.1;
Serial.print(” Midiendo “);
Serial.print(i);
Serial.print (” vez “);
Serial.print(cm);
Serial.print(” centimetros “);
Serial.println();
delay (150);
i = i+1;
}
El sensor de infrarojos
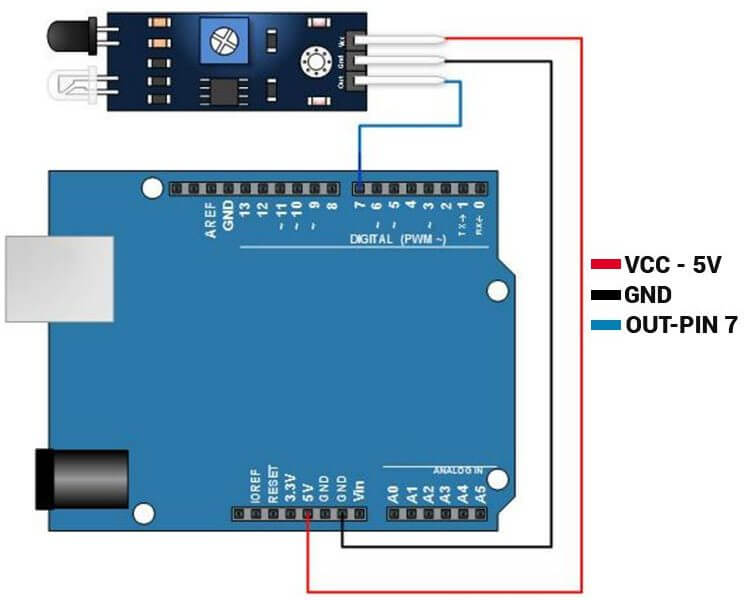
El FC-51 es un sensor de obstáculos reflectivo infrarrojo diseñado para detectar la presencia de objetos cercanos sin contacto físico, utilizando un sistema emisor-receptor basado en luz infrarroja. El módulo incorpora un LED infrarrojo (IR) que emite un haz de luz invisible, y un fototransistor receptor que detecta la luz reflejada por objetos próximos. Cuando un objeto entra en el rango de detección (ajustable mediante un potenciómetro integrado), parte de la luz infrarroja se refleja hacia el fototransistor, lo que cambia su estado de conducción y activa la salida digital del sensor (normalmente LOW cuando detecta un obstáculo).
ESPECIFICACIONES Y CARACTERÍSTICAS
- Modelo: FC-51.
- Chip de funcionamiento: LM393.
- Voltajes:
- Alimentación: 3.3 – 5 VDC.
- Salida Digital: 5 VDC.
- Distancia de detección: 20 mm – 300 mm (ajustable).
- Angulo de detección: 35°.
- Pines:
- VCC: Voltaje de alimentación.
- OUT: Salida de tensión digital (0,1).
- GND: Tierra.
- Dimensiones: 30 mm x 15 mm x 7 mm.
El código es:
const int IR_Sensor = 7; //Salida del Sensor IR FC-51
void setup()
{
pinMode(13, OUTPUT); // LED en el ARDUINO UNO
pinMode(IR_Sensor, INPUT);
Serial.begin (9600);
}
void loop()
{
if (digitalRead(IR_Sensor) == HIGH) // si no hay obstaculo
{
digitalWrite(13, LOW); // Se apaga sin obstaculo
Serial.println (“BAJO”);
}
else
{
digitalWrite(13, HIGH); // Se enciendo cuando hay un obstaculo
Serial.println (“ALTO”);
}
}
El sensor IR agudo (SHARP)
Un sensor SHARP es un sensor óptico capaz de medir la distancia entre él y un objeto, para esto el sensor con la ayuda de un emisor infrarrojo y un receptor miden la distancia usando triangulación.
El método de triangulación consiste en medir uno de los ángulos que forma el triángulo emisor-objeto-receptor, el Receptor es un PSD (Position Sensitive Detector) que detecta el punto de incidencia el cual depende del ángulo y a su vez de la distancia del objeto.
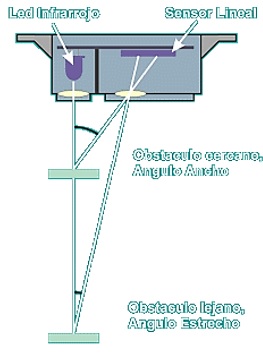
La geometría del sensor y de su óptica es el que limita el rango del sensor.
El termino SHARP (Agudo) es porque tiene un rango de visión muy reducido, esto porque la luz que emite es puntual, lo que permite usar el sensor para escanear o mapear áreas, pero teniendo en cuenta que objetos pequeños serán difíciles de detectar.
También podemos usar varios sensores SAHRP para ampliar el rango de visión estos se pueden poner en diferente dirección e incluso en la misma dirección siempre y cuando las líneas de visión no queden muy cercanas.
Una ventaja adicional es que no son sensibles a la luz ambiental o el Sol, enemigo de los sensores infrarrojos, un SHARP usa una luz infrarroja intermitente con una frecuencia determinada, que en el receptor es filtrada y elimina cualquier otra fuente de luz diferente a la frecuencia emitida.
Y el código así como varios otros experimentos puede ser encontrado en:
https://naylampmechatronics.com/blog/55_tutorial-sensor-de-distancia-sharp.html